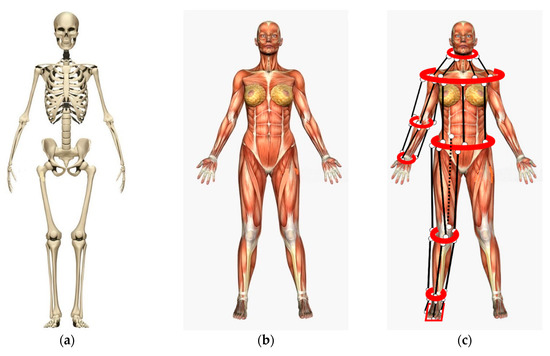
Toe joint mechanism of human (a), and of existing humanoid robots (b).
$ 15.50 · 4.9 (526) · In stock


Human-Like Toe Joint Mechanism

Whole-body multi-contact motion in humans and humanoids: Advances of the CoDyCo European project - ScienceDirect

PDF) Toe joint mechanism using parallel four-bar linkage enabling humanlike multiple support at toe pad and toe tip

Designing a More Human-Like Lower Leg for Biped Robots - IEEE Spectrum

Robotics Basics: Definition, Use, Terms - Infineon Technologies
Human-Centric Robotics

PDF) Toe joint mechanism using parallel four-bar linkage enabling humanlike multiple support at toe pad and toe tip

Humanoid robot - Wikipedia
How can quaternions be used in the representation of joint movement for humanoid robots? - Quora
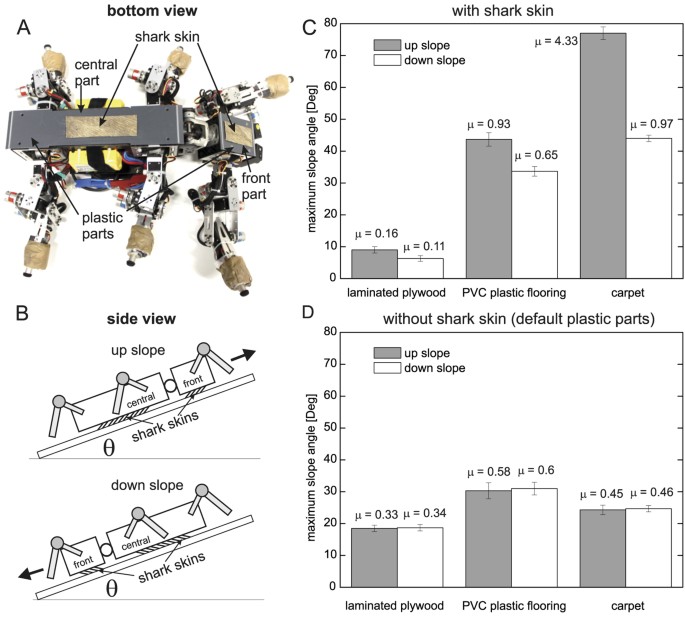
Enhanced Locomotion Efficiency of a Bio-inspired Walking Robot using Contact Surfaces with Frictional Anisotropy
Robotics, Free Full-Text
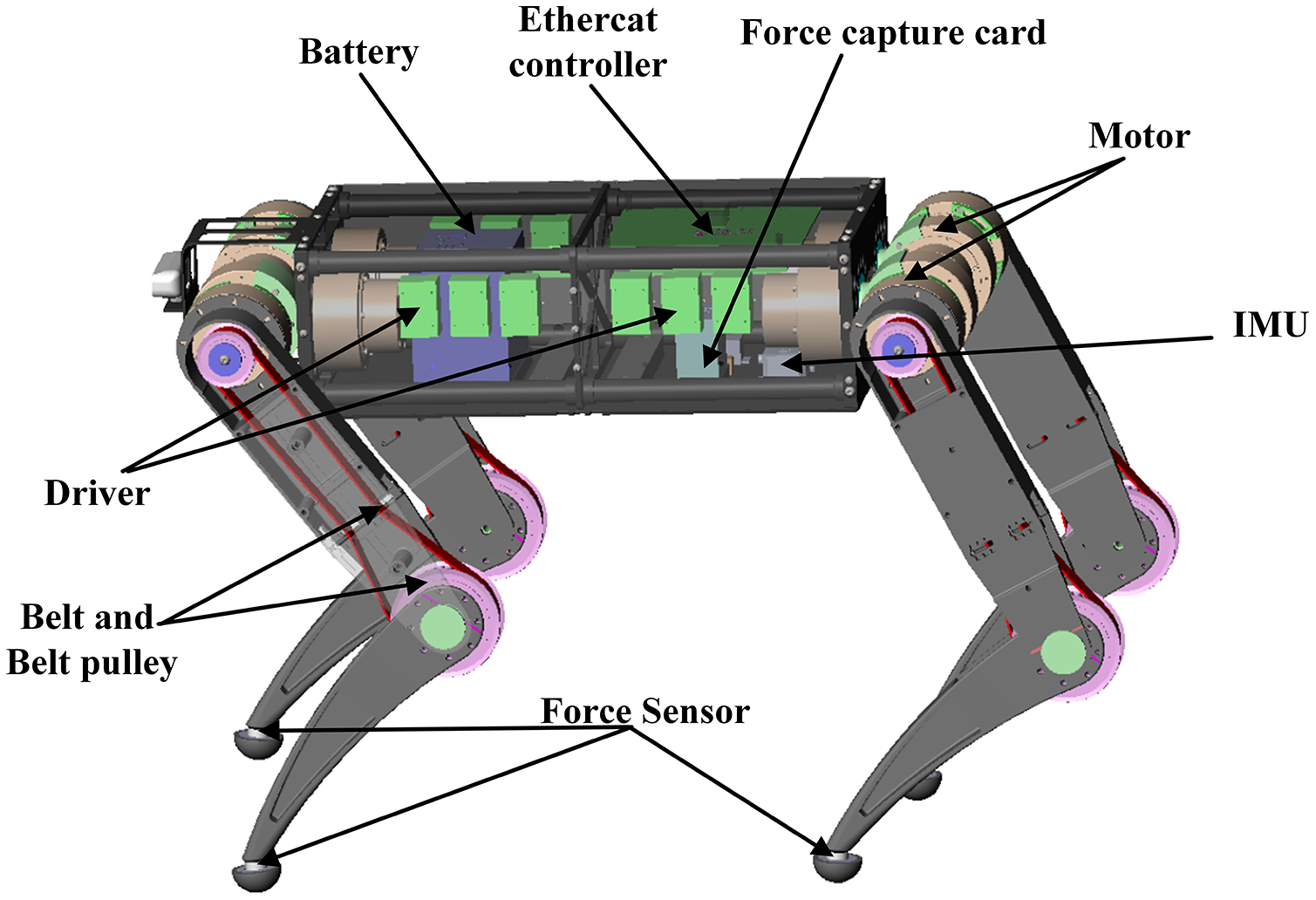
Whole-body kinematic and dynamic modeling for quadruped robot under different gaits and mechanism topologies [PeerJ]
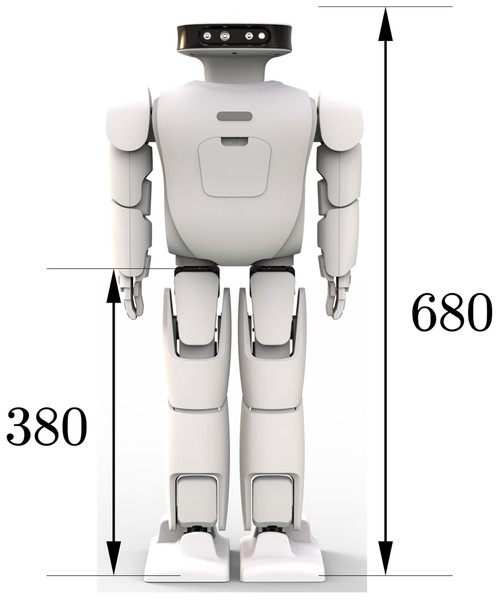
Kid-size robot humanoid walking with heel-contact and toe-off motion [PeerJ]