The powered simple walking model. (a) A hip spring is attached
$ 17.50 · 4.5 (294) · In stock

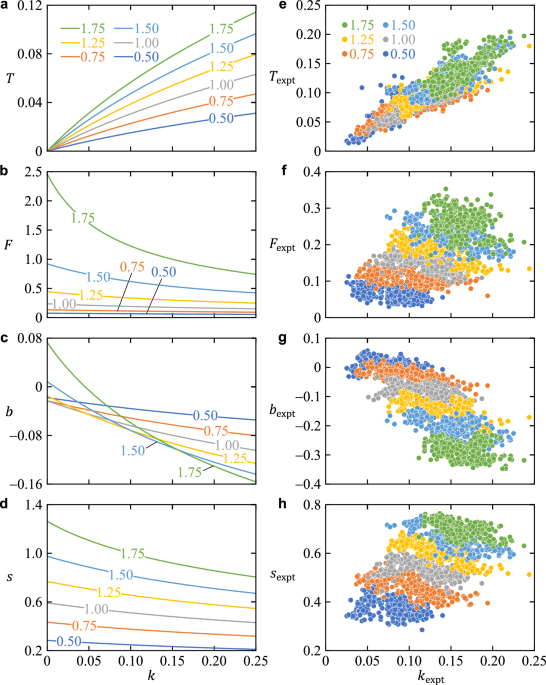
A powered simple walking model explains the decline in propulsive force and hip flexion torque compensation in human gait

How to Improve Your Golf Swing How to Train X-Factor and Torque

Snapshots of the simulated bipedal robot. (A) 0.5 m/s (B) 0.8 m/s (C)

PDF) A powered simple walking model explains the decline in propulsive force and hip flexion torque compensation in human gait

Gait Based on the Spring-Loaded Inverted Pendulum

The simple bipedal model consists of two rigid legs of length ℓ and
A powered simple walking model explains the decline in propulsive force and hip flexion torque compensation in human gait
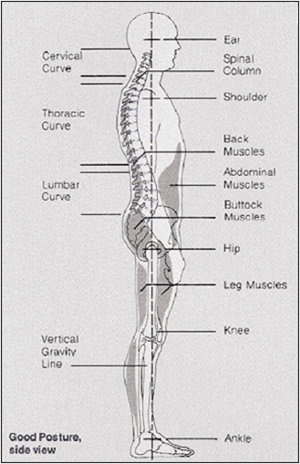
Injury Prevention and Body Mechanics - Physiopedia

Influence of k S and k D on the foot locations. a) Step length and

Margins of stability as a function of walking speed between 1.0 and

118372 PDFs Review articles in WALKING
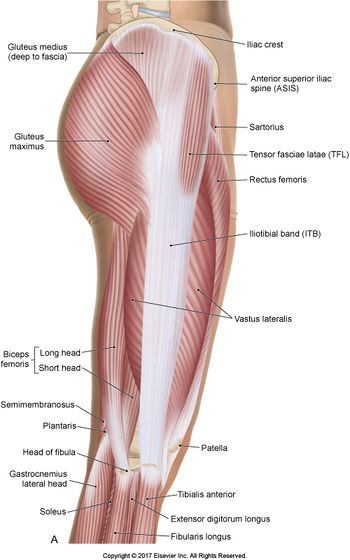
Iliotibial Tract - Physiopedia