Frontiers Gait Optimization Method for Humanoid Robots Based on
$ 6.00 · 4.8 (774) · In stock

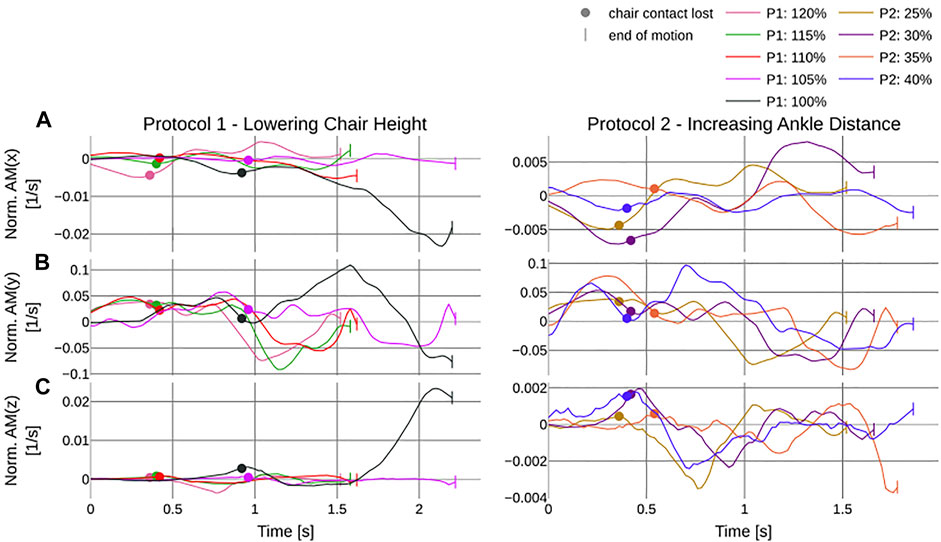
Frontiers Optimization of Dynamic Sit-to-Stand Trajectories to
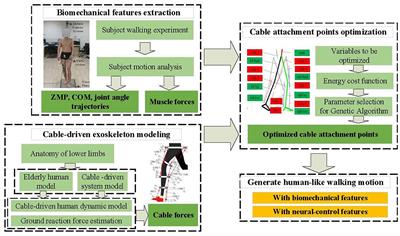
Frontiers Towards Human-like Walking with Biomechanical and

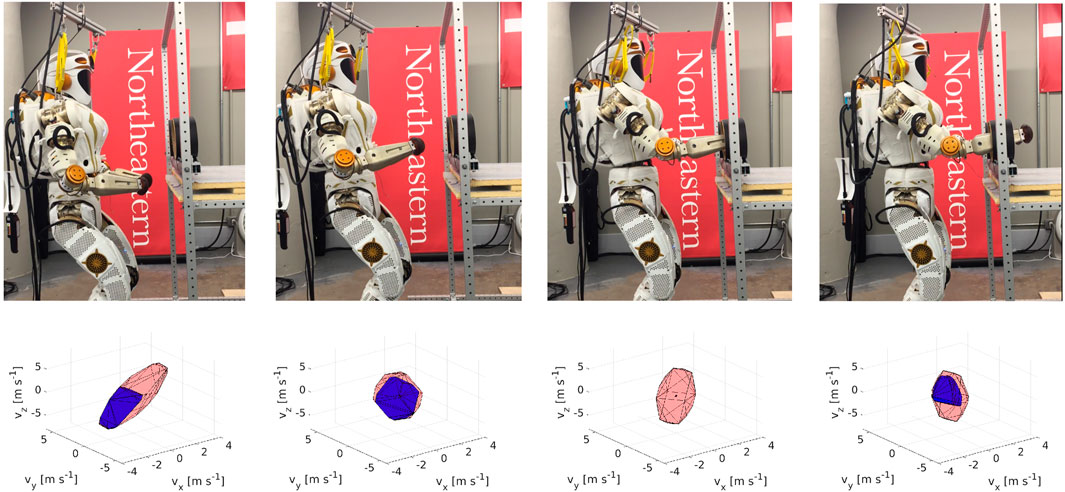
Overview of humanoid robot HRP-4 (left). The robot can wear a
Frontiers A Holistic Approach to Human-Supervised Humanoid Robot
Sensors, Free Full-Text
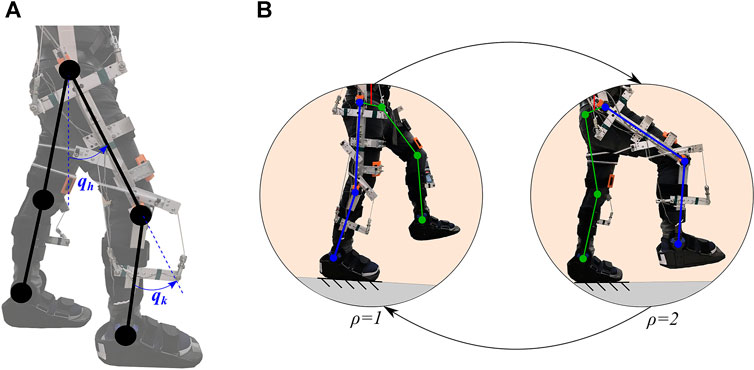
Frontiers Closed-Loop Torque and Kinematic Control of a Hybrid
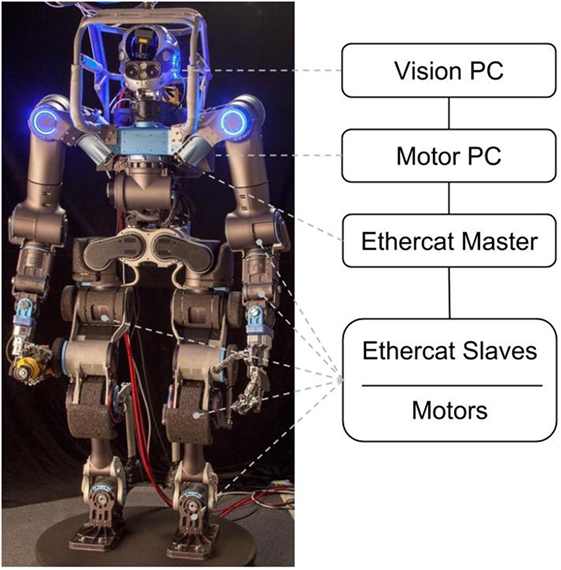
Frontiers The Walk-Man Robot Software Architecture

Smart Gait: A Gait Optimization Framework for Hexapod Robots
Frontiers Humanoid Robot Cooperative Motion Control Based on

Sensors, Free Full-Text
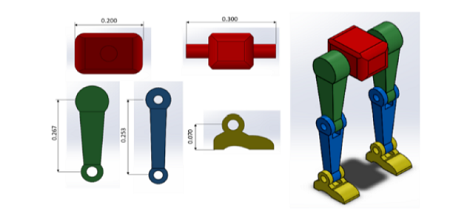
Control and Simulation of a 6-DOF Biped Robot based on Twin
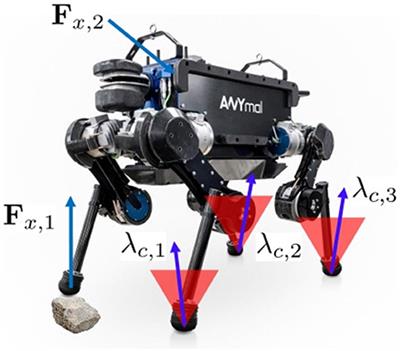
Frontiers An Optimization-Based Locomotion Controller for
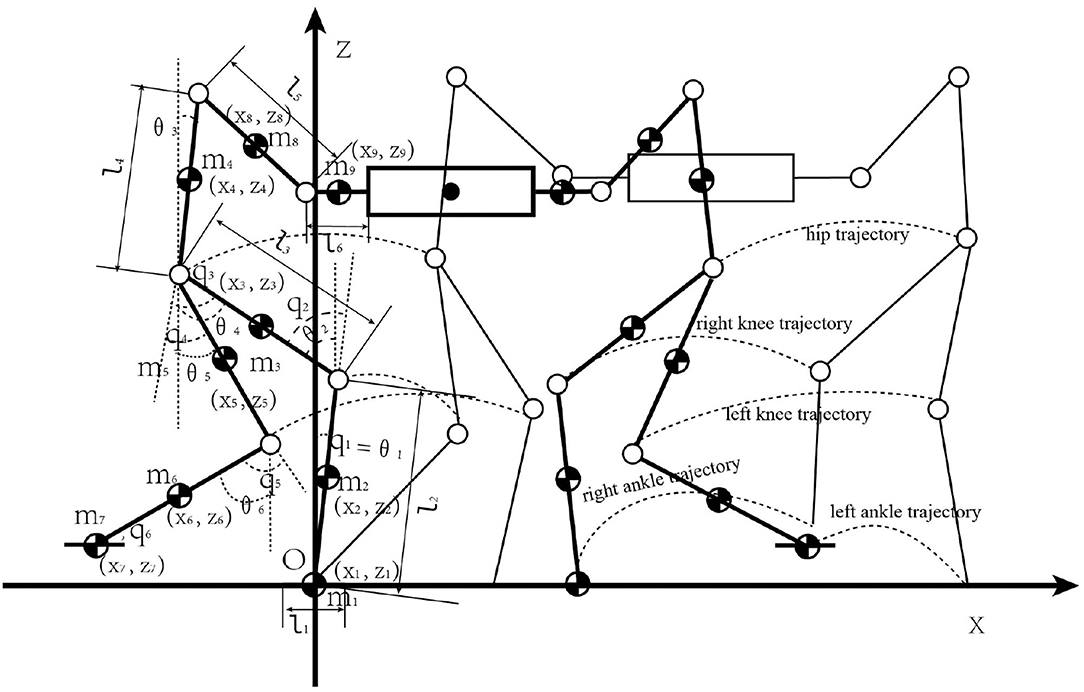
Frontiers Gait Optimization Method for Humanoid Robots Based on

Smart Gait: A Gait Optimization Framework for Hexapod Robots